Robotique en essaim : la suite du projet de notre Pôle Innovation !
2022-09-30
Le Pôle Innovation prolonge son projet sur la robotique en essaim en explorant des points plus spécifiques. On vous présente quelques extraits de l’article.
Introduction
“Récemment, les missions réalisables des systèmes multi-agents (SMA) composés par des véhicules aériens sans pilote (UAV) dans les secteurs civil et industriel ont été mises en évidence et ont motivé la communauté scientifique à accroître ses efforts de recherche. Les applications actuelles basées sur les SMA comme l'agriculture de précision, la surveillance de l'environnement ou le transport de marchandises, pour n'en citer que quelques-unes, nécessitent des modules de contrôle embarqués économes en énergie pour améliorer l'endurance, tout en faisant preuve de robustesse face aux conditions atmosphériques défavorables[...]”
“Motivés par ces faits et allant plus loin que notre premier travail, notre article étudie le consensus et formation d'un système multi-agents (SMA) composé par des véhicules à décollage et atterrissage vertical soumis à des perturbations aérodynamiques[…]”
Conditions théoriques et proposition d’un nouvel algorithme de contrôle
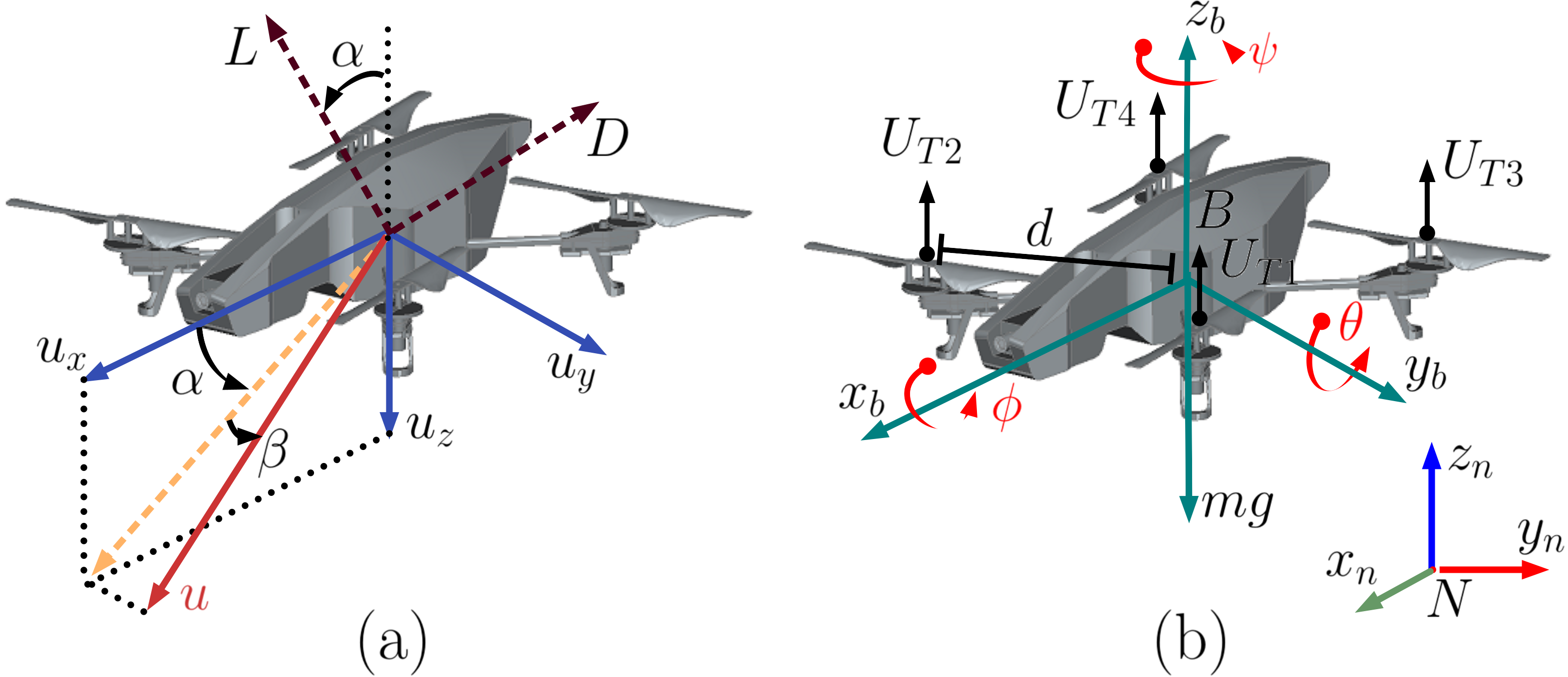
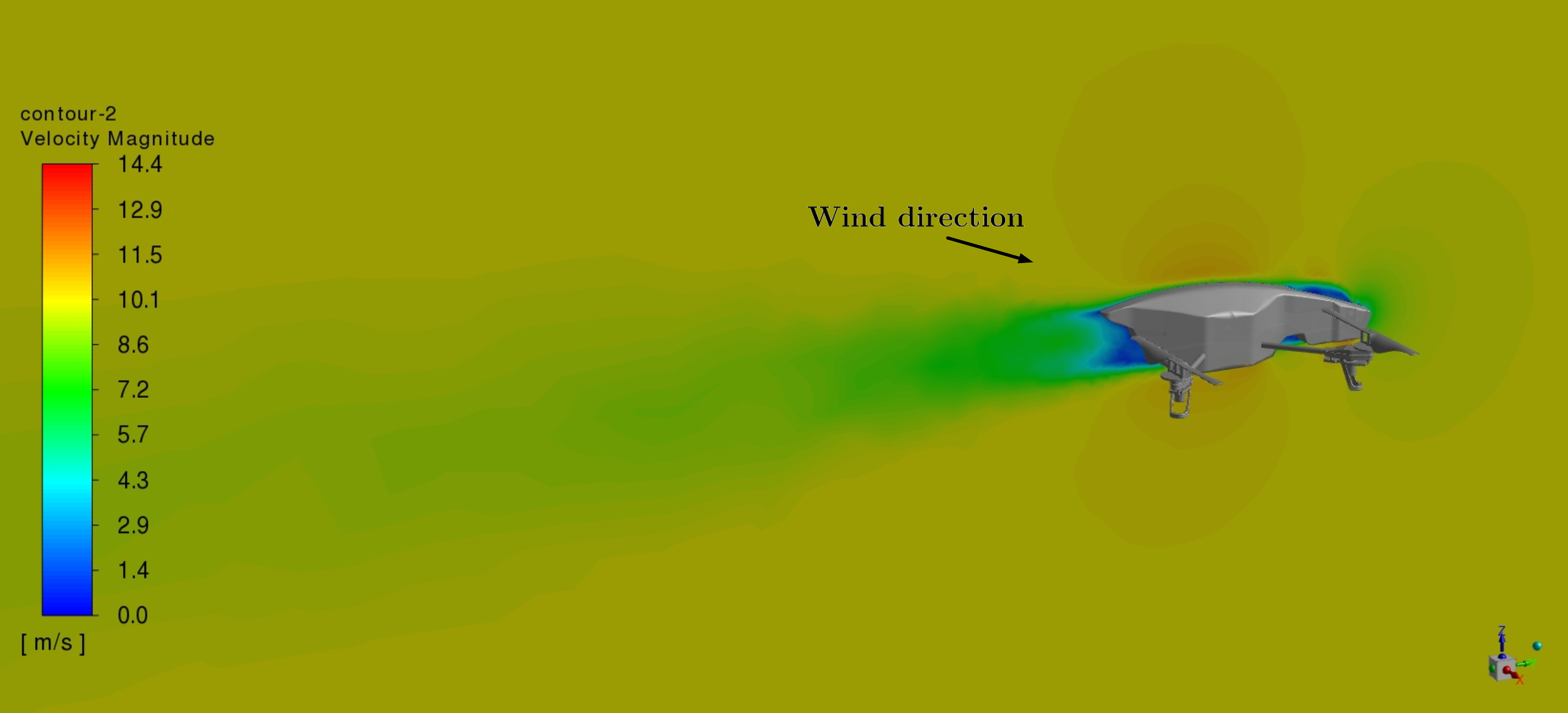
“Dans un premier temps, le modèle mathématique de chaque drone est détaillé, pour dériver ensuite la loi de commande correspondante pour stabiliser l’orientation de chaque véhicule. Après, la dynamique de translation du groupe est étendue pour inclure l'aérodynamique. Afin d'atteindre l'objectif de consensus, nous proposons un algorithme de contrôle robuste adaptatif par modes glissants (sliding-mode control SMC, en anglais), qui est déclenché par des événements en prenant en compte un schéma leader-suiveur[…]”
“Par rapport aux techniques de contrôle en temps continu, qui peuvent être détériorées en raison de la largeur de bande de communication limitée, les méthodes de contrôle basées sur les événements gèrent et réduisent l'utilisation de la bande passante du réseau et des ressources informatiques. Essentiellement, la commande basée sur les événements calcule et met à jour les signaux de commande lorsque des conditions spécifiques sont remplies, c'est-à-dire lorsqu'un événement se produit[…]”
Résultats
“Pour valider la proposition, nous avons fait les correspondantes preuves mathématiques. En plus, une simulation numérique qui prend en compte 5 drones Parrot a été implémentée. Les drones décollent d'endroits aléatoires et effectuent une formation à une altitude souhaitée. Ensuite, ils survolent une trajectoire souhaitée, tout cela alors qu'ils sont soumis à un environnement venteux réaliste […]”
Vous souhaitez en savoir plus ? Retrouvez l’étude complète sur le site : IEEE